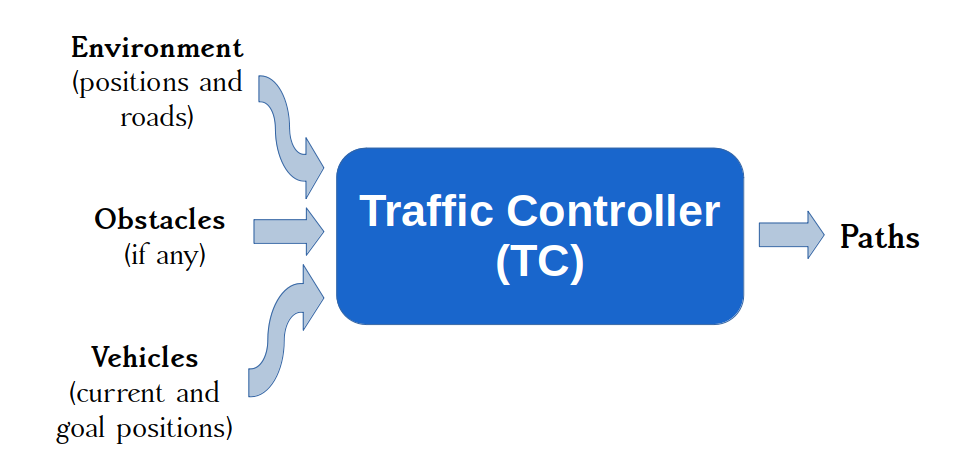
TC is a Coloured Petri Nets and D* Lite searching algorithm based SOFTWARE, which dynamically determines collision-free trajectories for vehicles on a discrete space. TC gets as inputs the information of the vehicles (current and goal desired positions), the environment in which they move and, if any, obstacles present in it. As output, the optimal trajectories for each vehicle are obtained, considering those obstacles and, at the same time, avoiding bottlenecks and jams.
Due to the employed formal method technique, possible deadlocks are also prevented. TC has already been validated on a lab environment. Currently, it is being validated and demonstrated in relevant industrial environments. Once the technology is fully tested and qualified, by means of statistical evidence, the official SOFTWARE will be released.
Features
The characteristics of TC are:
- Native execution
- Static configuration (defined at compilation time that can not be modified during runtime):
- Number of vehicles.
- Maximum number of positions
- Maximum number of roads
- Distributed as compiled binary
- Low footprint
- Compatible with GNU/Linux and Windows (other OSs could be possible).
- Support for (please refer to Downloads page for examples):


- Connection with other frameworks and tools (e.g. FlexSim, ROS, Cyberbotics, Matlab Simulink)
Outcome
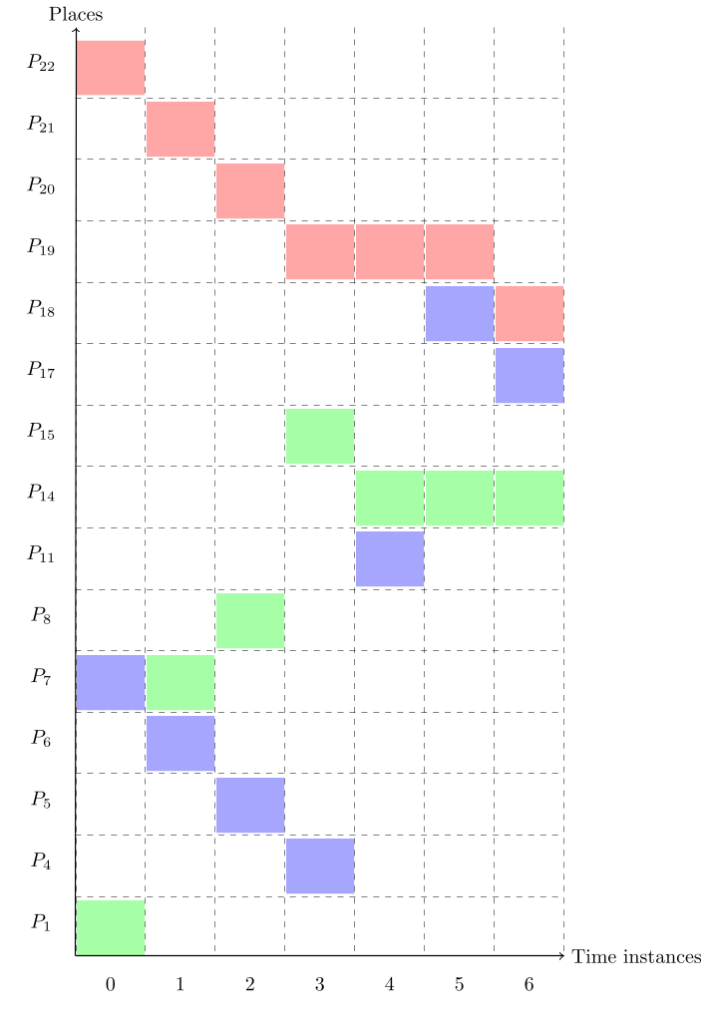
TC computes and comes up, if possible, optimal trajectories for vehicles towards the goal while traffic jams and deadlocks are avoided. ln each time instance, the SOFTWARE indicates the next positions for the vehicles. Below, a visual representation example of this procedure is shown. For the environment, 23 positions, 28 roads and 3 vehicles (depicted as red, blue and green) were defined.
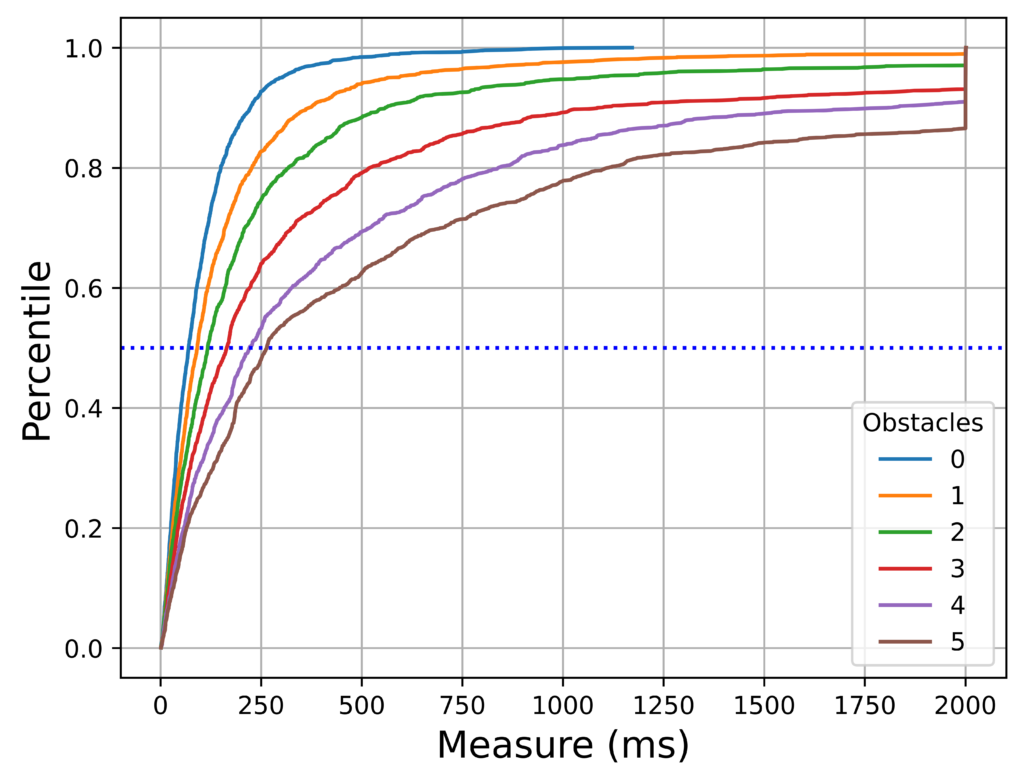
Performance
The performance of TC highly depends on the system computation capabilities, size of the environment, number of vehicles and detected obstacles. Next, the performance results of TC obtained through process simulations, executed on an x86 architecture computer (AMD E1-2500 mobile processor running at 1.4 GHz), are shown. The results are processed to obtain a probability distribution by means of an Empirical Cumulative Distribution Function (ECDF), which represents the proportion or count of observations falling below each unique value in a dataset, describing the probability distribution of a continuous random variable. As it can be observed, the performance capability of the TC decreases as more obstacles are detected in the environment.